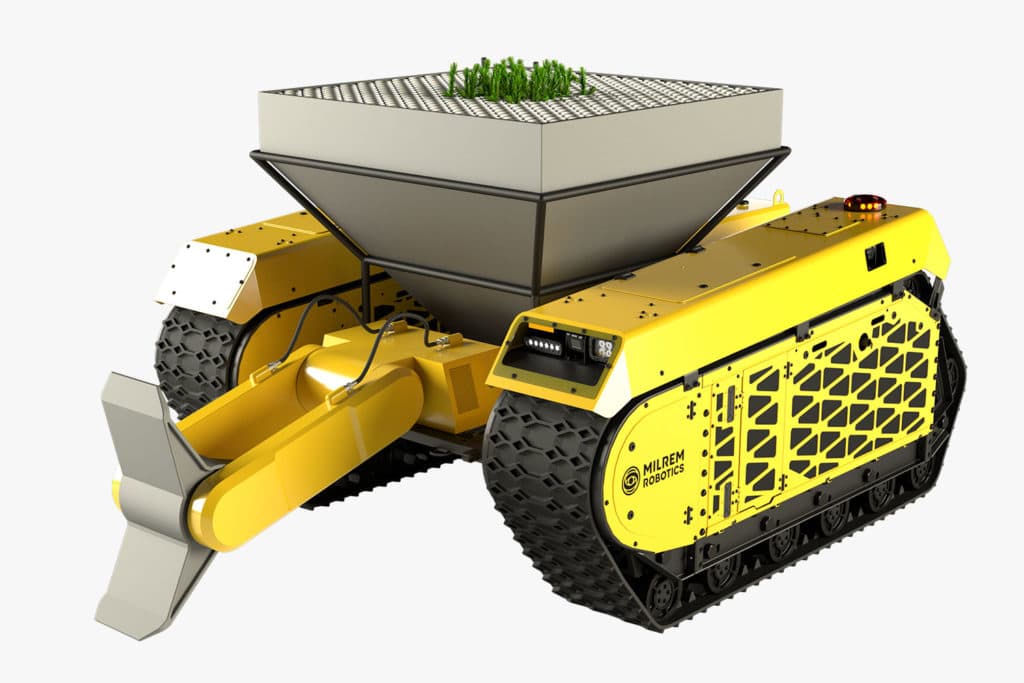
 Il produttore di robot Milrem Robotics e l’Università di Tartu (Estonia) hanno collaborato per sviluppare due tipi di robot forestali autonomi che potrebbero piantare migliaia di alberi al giorno. I robot si basano sulla gamma di veicoli terrestri autonomi dell’azienda. Uno dei robot è una fioriera, chiamata Multiscope Forester Planter, che è dotata di un carico utile di semina modulare con una capacità di 380 piantine. La sua velocità di impianto è di circa 5-7 ore per ettaro, a seconda delle specie di albero e del terreno. Registra anche la posizione esatta di ogni albero. L’altro dei due robot forestali, il Decespugliatore Robotic Forester, è dotato di una centralina idraulica, uno strumento di disboscamento e dei sensori necessari per il movimento dell’attrezzo, in grado di rimuovere la vegetazione attorno alle piantine.
Il produttore di robot Milrem Robotics e l’Università di Tartu (Estonia) hanno collaborato per sviluppare due tipi di robot forestali autonomi che potrebbero piantare migliaia di alberi al giorno. I robot si basano sulla gamma di veicoli terrestri autonomi dell’azienda. Uno dei robot è una fioriera, chiamata Multiscope Forester Planter, che è dotata di un carico utile di semina modulare con una capacità di 380 piantine. La sua velocità di impianto è di circa 5-7 ore per ettaro, a seconda delle specie di albero e del terreno. Registra anche la posizione esatta di ogni albero. L’altro dei due robot forestali, il Decespugliatore Robotic Forester, è dotato di una centralina idraulica, uno strumento di disboscamento e dei sensori necessari per il movimento dell’attrezzo, in grado di rimuovere la vegetazione attorno alle piantine.
 Il robot è progettato per essere forte e durevole in ambienti difficili come le aree di sgombero. Lo stesso sistema può essere utilizzato con altre applicazioni per la manutenzione di linee elettriche, manutenzioni stradali, ecc. I robot forestali hanno le dimensioni di una piccola macchina e pesano circa una tonnellata. Entrambi sono lunghi 240 cm, larghi 200 cm e alti 115 cm, e possono raggiungere una velocità massima di 20 km / h. Il suo sistema di navigazione utilizza LiDAR, telecamere e sistemi di posizionamento globale basati su laser. LiDAR produce una rappresentazione geometrica tridimensionale dell’ambiente, mentre le immagini della telecamera ad alta risoluzione riempiono gli spazi vuoti. Tutti i dati vengono combinati in tempo reale, completandosi a vicenda e consentendo ai robot forestali di guidare autonomamente in una foresta. Le telecamere vengono utilizzate anche per il riconoscimento delle immagini e forniscono un display visivo per l’operatore se ha bisogno di guidare il robot da remoto. Questa è una delle tante applicazioni interessanti … che dimostrano che la tecnologia della robotica mobile sta maturando rapidamente e consente ai robot di affrontare nuovi tipi di attività in ambienti difficili.
Il robot è progettato per essere forte e durevole in ambienti difficili come le aree di sgombero. Lo stesso sistema può essere utilizzato con altre applicazioni per la manutenzione di linee elettriche, manutenzioni stradali, ecc. I robot forestali hanno le dimensioni di una piccola macchina e pesano circa una tonnellata. Entrambi sono lunghi 240 cm, larghi 200 cm e alti 115 cm, e possono raggiungere una velocità massima di 20 km / h. Il suo sistema di navigazione utilizza LiDAR, telecamere e sistemi di posizionamento globale basati su laser. LiDAR produce una rappresentazione geometrica tridimensionale dell’ambiente, mentre le immagini della telecamera ad alta risoluzione riempiono gli spazi vuoti. Tutti i dati vengono combinati in tempo reale, completandosi a vicenda e consentendo ai robot forestali di guidare autonomamente in una foresta. Le telecamere vengono utilizzate anche per il riconoscimento delle immagini e forniscono un display visivo per l’operatore se ha bisogno di guidare il robot da remoto. Questa è una delle tante applicazioni interessanti … che dimostrano che la tecnologia della robotica mobile sta maturando rapidamente e consente ai robot di affrontare nuovi tipi di attività in ambienti difficili.

Fonte: ecoinventos.com







