 Robot minuscoli, quasi microscopici, capaci di entrare all’interno del nostro corpo e di effettuare svariate operazioni. E’ il risultato di una ambiziosa ricerca che si sta dimostrando particolarmente emozionante:
Robot minuscoli, quasi microscopici, capaci di entrare all’interno del nostro corpo e di effettuare svariate operazioni. E’ il risultato di una ambiziosa ricerca che si sta dimostrando particolarmente emozionante:

Parliamo di piccoli robot dall’aspetto molto simile a quello di un granchio – realizzati con strutture fotoniche come catadiottri e materiali di rilevamento colorimetrico supportano forme semplici di monitoraggio e localizzazione wireless. L’utilizzo futuro di questa innovativa tecnologia potrebbe riguardare interventi medici indolori per i pazienti, forse persino capace di sostituire interventi chirurgici invasivi. Realizzati con una tecnica coniata da Rogers e Huang otto anni fa, questi piccoli “transformers” sono stati creati da che ricercatori hanno deciso di utilizzare qualcosa come un tipo di meccanismo a libro pop-up, capace di modellarsi da piatta a 3D attraverso l’aumento della temperatura. Ecco come funzionano questi robot:
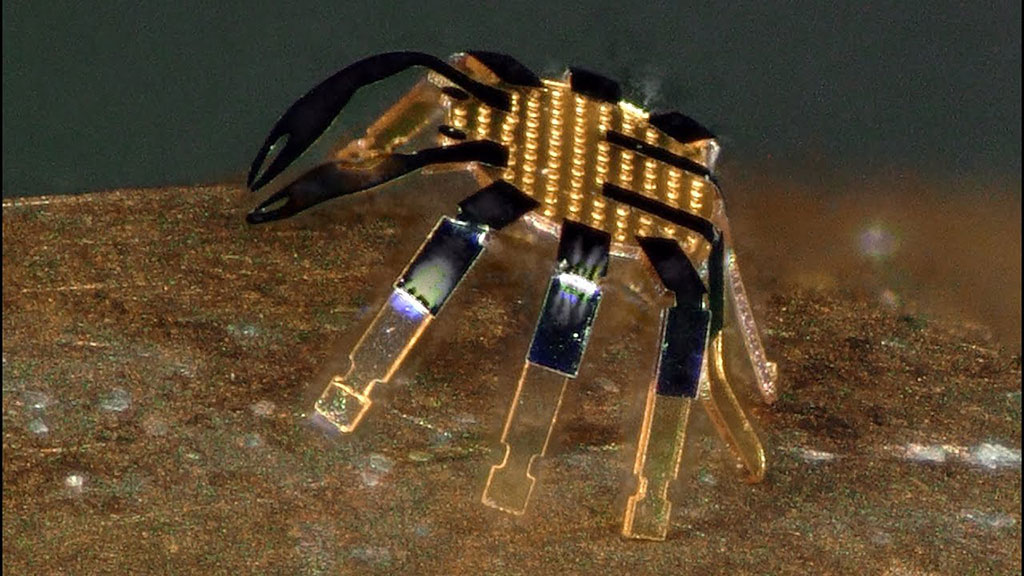
La procedura di produzione sfrutta l’instabilità meccanica controllata per creare strutture multimateriali 3D in layout che vanno da matrici di filamenti e costrutti di origami a configurazioni biomimetiche e altro. Un equilibrio di forze associate a una lega a memoria di forma unidirezionale e la resilienza elastica di un guscio incapsulante fornisce la base per deformazioni reversibili di queste strutture. Le modalità di locomozione e manipolazione spaziano da piegarsi, torcersi ed espandersi in seguito al riscaldamento globale a strisciare, camminare, girare e saltare lineare/curvilineo mediante l’attivazione termica locale indotta dal laser. Un video diffuso sul web:
“Potresti immaginare i micro-robot come agenti per riparare o assemblare piccole strutture o macchine nell’industria o come assistenti chirurgici per ripulire le arterie ostruite, per fermare l’emorragia interna o per eliminare i tumori, il tutto in procedure minimamente invasive” – ha dichiarato in una nota John A. Rogers, un professore di scienza dei materiali e ingegneria presso la Northwestern University e coautore dell’articolo pubblicato sulla rivista Science Robotics. Un altro video:
Fonte: https://www.science.org/doi/10.1126/scirobotics.abn0602



")



